Un controlador lógico programable (PLC, por sus sigias en
inglés) se define como un dispositivo electrónico digital que usa una memoria
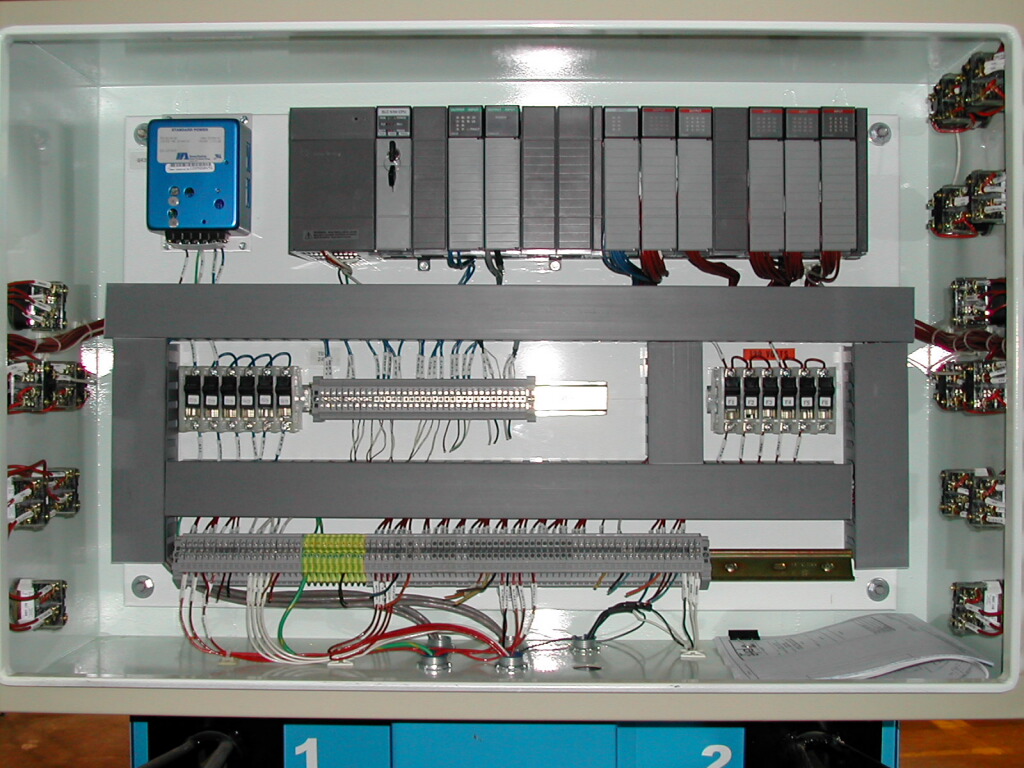
programable para guardar instrucciones y llevar a cabo funciones lógicas, de
configuración de secuencia, de sincronización, de conteo y aritméticas, para el
control de maquinaria y procesos (figura 19.1). Este tipo de procesadores se
denomina lógico debido a que su programación básicamente tiene que ver con la
ejecución de operaciones lógicas y de conmutación. Los dispositivos de entrada
(por ejemplo, un interruptor) y los dispositivos de salida (por ejemplo, un
motor), que están bajo control, se conectan al PLC; de esta manera el
controlador monitorea las entradas y salidas, de acuerdo con el programa
diseñado por el operador para el PLC y que éste conserva en memoria, y de esta
manera se controlan máquinas o procesos. En un principio, el propósito de estos
controladores fue sustituir la conexión física de relevadores de los sistemas
de control lógicos y de sincronización. Los PLCs tienen la gran ventaja de que
permiten modificar un sistema de control sin tener que volver a alambrar las
conexiones de los dispositivos de entrada y de salida; basta con que el
operador digite en un teclado las instrucciones correspondientes. Lo anterior
permite contar con un sistema flexible mediante el cual es posible controlar
sistemas muy diversos entre sí, tanto en tipo como en complejidad.
Si bien los PLCs son similares a las computadoras, tienen
características específicas que permiten su empleo como controladores. Estas
son:
1.Son robustos y están diseñados para resistir vibraciones,
temperatura, humedad y ruido.
2.La interfaz para las entradas y las salidas está dentro
del controlador.
3.Es muy fácil programarlos, así como entender el lenguaje de programación. La programación básicamente consiste en operaciones de lógica y conmutación.
Programación
La programación de un PLC mediante diagramas de escalera
consiste en la elaboración de un programa de manera similar a como se dibuja un
circuito de contactos eléctricos. El diagrama de escalera consta de dos líneas
verticales que representan las líneas de alimentación. Los circuitos se
disponen como líneas horizontales, es decir, como si fueran los peldaños de una
escalera, sujetos entre las dos líneas verticales. La muestra los
símbolos estándar básicos que se utilizan, así como un ejemplo de peldaños en
un diagrama de escalera.
Cuando se dibuja la línea de circuito de un peldaño, las
entradas siempre preceden a las salidas y siempre debe haber por lo menos una
salida por cada línea. Los peldaños deben empezar con una o varias entradas y
terminar con una salida.
Las entradas y las salidas están numeradas y la notación
utilizada depende del fabricante del PLC; por ejemplo, en la serie F de PLC
Mitsubishi antes de un elemento de entrada hay una X y antes de un elemento de
salida, una Y; la numeración empleada es la siguiente:
Entradas
X400-407,410-413
X500-507, 510-513 (24 entradas posibles)
Salidas
Y430-437
Y530-537

Entrada/salida análoga
Es frecuente encontrar sensores que producen señales
analógicas, así como actuadores que requieren señales analógicas. Por ello,
algunos PLC deben tener un módulo para conversión de señales analógicas a
digitales en los canales de entrada, así como un módulo para conversión de
señales digitales a analógicas en los canales de salida.
Un PLC equipado con canales de entrada analógica se puede
aprovechar para seguir una función de control continuo, es decir, un control
PID Por ejemplo, para un control proporcional de una entrada analógica se lleva
a cabo el siguiente conjunto de operaciones:
1.Convertir la salida del sensor en una señal digital.
2.Comparar la salida del sensor convertida con el valor
requerido del sensor, es decir, el valor de calibración, y obtener la
diferencia. Esta diferencia es el error.
3.Multiplicar el error por la constante de proporcionalidad
Kp.
4.Transferir este resultado a la salida que va al
convertidor de señal digital a analógica y utilizar el resultado como señal de
corrección para el actuador.
No hay comentarios:
Publicar un comentario